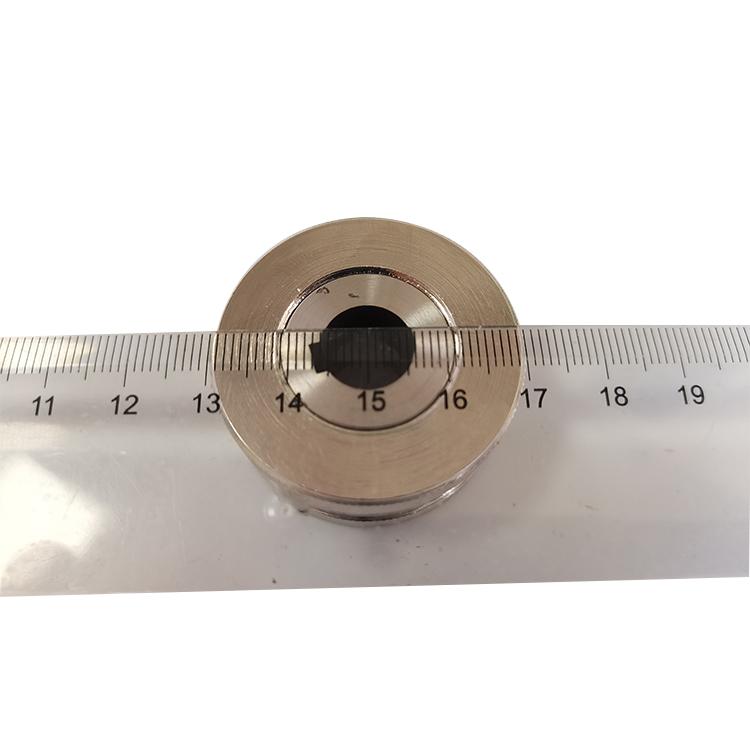



Neodymium magnetic wheel/gear
1.Dimensions: Dia from 25mm to 160mm
2.Materials: NdFeB and Steel
3.Magnetization direction: Axial magnetized
4.Max operating temp.: 100 degrees celsius
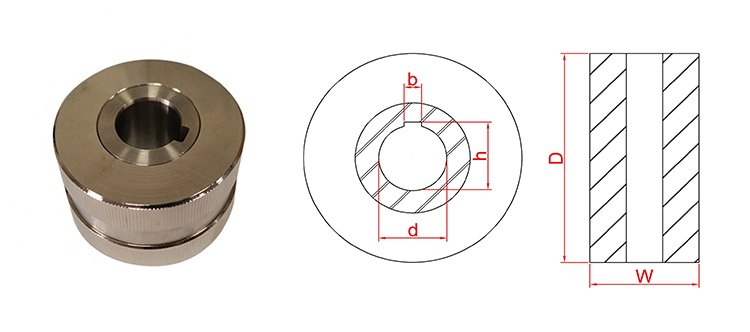
Magnetic Wheel
|
NO. |
D (mm) |
d (mm) |
W (mm) |
b (mm) |
h (mm)
|
Force (N) |
Temperature (°C) |
Weight (Kgs) |
|
KMW25 |
25 |
8 |
16 |
3 |
8.6 |
55 |
100 |
0.054 |
|
KMW32 |
32 |
10 |
18 |
4 |
11.1 |
80 |
100 |
0. 10 |
|
KMW40 |
40 |
12 |
20 |
4 |
13.1 |
120 |
100 |
0.20 |
|
KMW50 |
50 |
16 |
25 |
5 |
17.3 |
200 |
100 |
0.35 |
|
KMW63 |
63 |
20 |
32 |
6 |
21.7 |
330 |
100 |
0.70 |
|
KMW80 |
80 |
25 |
40 |
8 |
26.7 |
630 |
100 |
1.45 |
|
KMW100 |
100 |
30 |
50 |
8 |
31.7 |
900 |
100 |
2.80 |
|
KMW125 |
125 |
40 |
62 |
12 |
42.1 |
1520 |
100 |
5.35 |
|
KMW160 |
160 |
50 |
80 |
14 |
52.6 |
2940 |
100 |
11.40 |
The forces have been determined at room temperature on a plate in polished steel (S235JR according to DIN 10 025) with a thickness of 10 mm ( 1kg ~ 10N). Under normal test condition, the measured force is not lower than the specified value. Value is exceeded in general. Depending on the type of application (installation situation, temperatures, counter anchor etc .) the forces can be influenced enormously. The indicated values are serving as an orientation. Please get advice and help from our experts.
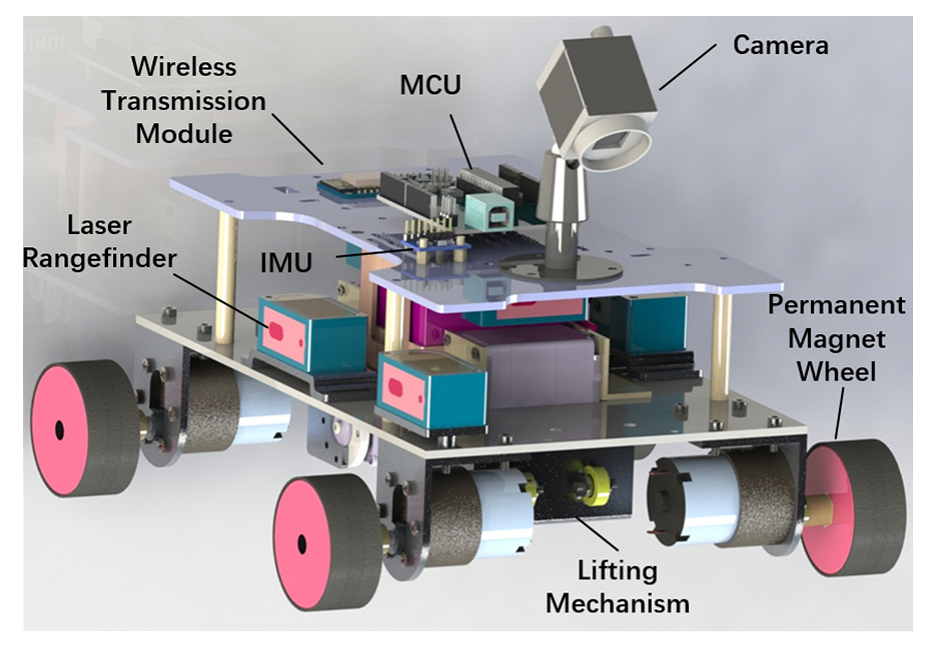
Application:
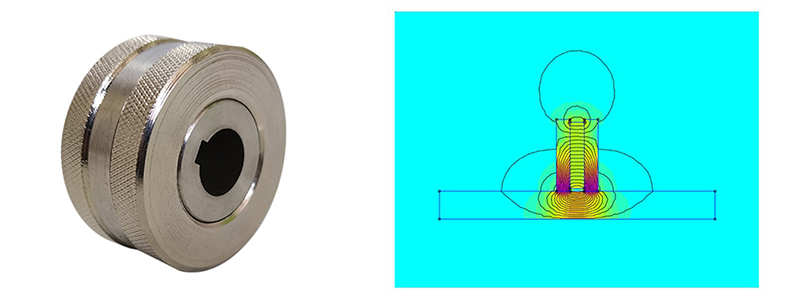
Magnetic wheel is the core of wall mobile robot to complete wall movement, which is used in some high-altitude wall-climbing robots. It is mainly used for inspection or spray painting of large cylindrical cans, or cleaning and spraying of buildings. It is used for inspection and thickness measurement in the nuclear industry, and can also be used in firefighting and shipbuilding industries.
Advantages:
The advantages are large adsorption force, simple design.
High power transmission capacity, no noise and no replacement parts, can be accompanied by permanent use
They are often used in special work environments to replace people to complete inspection work.


Others:
In addition to providing sufficient suction force, the flexibility of the magnetic wheel and its adaptability to the working surface must be considered. The magnetic wheel of the magnetic adsorption wall-climbing robot can be designed by using the finite element analysis tool.